|

|
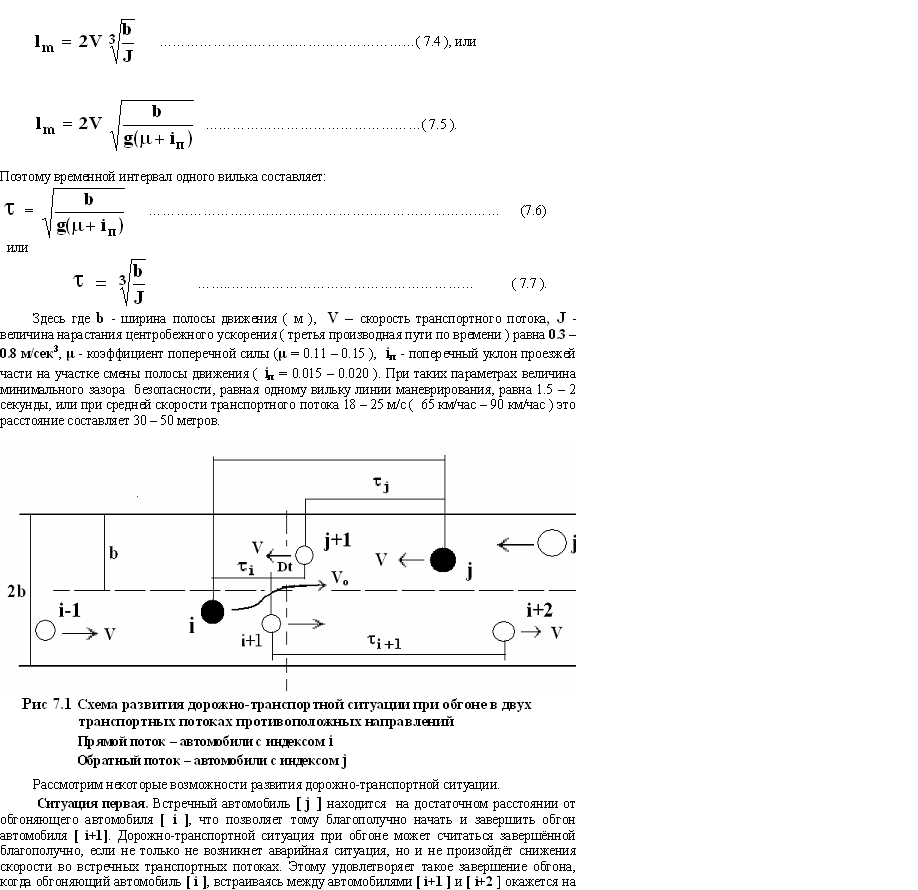
В. Маркуц канд. техн. наук© из книги В. Маркуц«Транспортные потоки»7.3. Математические модели взаимодействия автомобилей в транспортных потоках. Анализ дорожно-транспортных ситуаций. Возможности развития дорожно-транспортной ситуации. Логистические уравненияМатематическая модель реального процесса – это совокупность соотношений, которые связывают характеристики процесса функционирования системы с параметрами соответствующей системы, исходной информацией и начальными условиями. Впервые математическая теория транспортных потоков была предложена в работе известного американского специалиста Ф. Хейта, где установлено, соотношение между положениями теории транспортных потоков и теорией вероятностей, а также описаны обобщённые математические модели движения транспорта [64 ]. В известной монографии Д. Дрю [ 8 ] приведены основные математические модели движения транспортных потоков, введено понятие времени ожидания на участке въезда на автомагистраль в зоне слияния транспортных потоков и дано решение в интегральной форме. Дальнейшее развитие теория транспортных потоков получила в работах известных советских учёных В.Ф. Бабкова, В.В. Сильянова и Е.М. Лобанова [ 2, 48, 50 ], где разработаны теоретические основы нового направления изучения транспортных потоков – унифицированного имитационного моделирования на ЭВМ движения транспортного потока как сложной системы. Под имитацией, по определению Т. Нейлора понимается численный метод проведения на цифровых вычислительных машинах экспериментов с математическими моделями, описывающими поведение систем в течение продолжительных периодов времени. Работы многих исследователей [ 10, 48, 58, 62 ] показали, что имитационный метод является наиболее эффективным средством исследования сложных систем на основе сложных динамических моделей. Прогнозирование режимов движения может осуществляться на основе информационной модели восприятия дорожных условий с количественной оценкой сложности дорожных ситуаций и учётом стохастического характера процесса движения. Алгоритм прогнозирования режимов движения содержит в себе элементы статистического моделирования, математические и динамические модели движения и логистические уравнения [ 47 ]. Для количественного описания природы динамики изменения режимов движения транспортных потоков можно использовать теорию марковских процессов с дискретным состоянием, непрерывным по времени [ 48 ]. Вышеперечисленные методы исследования транспортных потоков представляют собой сложные унифицированные имитационные модели. Они весьма трудны для понимания и малопригодны для решения практических задач. Поэтому единственным приемлемым методом является метод статистического моделирования. Сущность метода статистического моделирования или метода статистических испытаний (его также называют методом Монте-Карло) состоит а построении для исследуемого процесса соответствующего моделирующего алгоритма, имитирующего поведение элементов сложной системы и взаимодействия между ними [ 62 ]. Одно такое воспроизведение (попытка) функционирования системы называют реализацией или испытанием, которые представляют собой как бы срез во времени. После каждого испытания регистрируют совокупность параметров, характеризующих случайный исход реализаций. В результате многократного повторения реализаций получают статистический материал, позволяющий выявить устойчивые закономерности функционирования системы. Чем больше таких реализаций, тем точнее можно определить конечный результат [ 18 ]. Результаты моделирования, полученные при воспроизведении единственной реализации в силу действия случайных факторов, будут реализациями случайных величин и не смогут объективно характеризовать процесс. Поэтому для получения статистически устойчивой информации искомые величины при исследовании процессов методом статистического моделирования необходимо определять как статистические оценки по данным большого числа реализаций процесса. Таким образом, многократная реализация моделирующего алгоритма позволяет получить эффективную оценку параметров элементов системы и её самой в целом. Рассмотрим развитие дорожно-транспортной ситуации при обгоне в транспортных потоках противоположных направлений. Обгон одного транспортного средства или целой группы другим автомобилем является наиболее распространённым явлением в дорожно-транспортной ситуации (рис 7.1). Развитие дорожно-транспортной ситуации обгона в двух транспортных потоках противоположных направлений происходит следующим образом. Основными участниками взаимодействия являются три автомобиля: обгоняющий автомобиль [ i ], обгоняемый автомобиль [ i+1 ] и встречный автомобиль [ j ]. Автомобиль [ j+1 ] не является участником дорожно-транспортной ситуации, не участвует в её развитии, так как проезжает мимо. Он необходим только для обозначения сечения дороги при составлении логистических уравнений дорожно-транспортной ситуации совместно с автомобилем [ i+1 ], который принимает непосредственное участие в развитии ситуации обгона. Автомобиль [ i ], намереваясь совершить обгон автомобиля (или группу автомобилей) [ i+1 ], приближается к нему и к осевой линии дороги и держится от него на минимальном расстоянии безопасности, равном одному вильку линии маневрирования в ожидании приемлемых интервалов между автомобилями [ j ] и [ j+1] и между автомобилями [ i+1 ] и [ i+2]. При этом, в случае неблагоприятного стечения обстоятельств, у него ещё сохраняется возможность вернуться на свою полосу движения, почти вплотную приткнувшись к заднему бамперу автомобиля [ i+1]. Напомним, что полная длина линии маневрирования при слиянии потоков состоит из двух обратных кривых переменного радиуса ( двух вильков ) и равна: безопасном расстоянии от них. При этом обгоняемому автомобилю [ i+1 ] не придётся снижать скорость, а автомобилю [ i+2 ] не придётся беспокоиться за свой задний бампер и удирать от догоняющего его автомобиля [ i ]. Математический аппарат представлен уравнениями главы 3 (Расчёт линий маневрирования и слияния автомобильных дорог и городских улиц). Алгоритм реализован в программе SitObgn_T для равномерного транспортного потока интенсивностью М1в прямом направлении и М2 – в обратном направлении, а так же в программе BTZ1_T для бимодального режима движения в двух направлениях - ситуация 1-а и 1-б. Ситуация вторая. Встречный автомобиль [ j ] находится на достаточном расстоянии от обгоняющего автомобиля [ i ], что позволяет тому попытаться начать обгон автомобиля [ i+1] при недостаточном интервале между автомобилями [ i+1 ] и [ i+2 ]. В этом случае он буквально "подрезает" автомобиль [ i+1 ] или "садится на хвост" автомобилю [ i+2 ]. В зависимости от квалификации участников дорожно-транспортной ситуации и их дальнейшего поведения в её развитии, исход может завершится либо благополучно, либо совершением ДТП. Алгоритм реализован в программе SitObgn_T для равномерного транспортного потока интенсивностью М1в прямом направлении и М2 – в обратном направлении, а так же в программе BTZ1_T для бимодального режима движения в двух направлениях - ситуация 2-а и 2-б. Ситуация третья. Временной интервал между автомобилями [ i+1 ] и [ i+2 ] вполне достаточен для начала и завершения обгона автомобиля [ i+1]. Однако встречный автомобиль [ j ] находится на недостаточном расстоянии от обгоняющего автомобиля [ i ]. В зависимости от квалификации участников дорожно-транспортной ситуации и их дальнейшего поведения в её развитии, исход может завершится либо благополучно, либо совершением ДТП. Алгоритм реализован в программе SitObgn_T для равномерного транспортного потока интенсивностью М1в прямом направлении и М2 – в обратном направлении, а так же в программе BTZ1_T для бимодального режима движения в двух направлениях - ситуация 3-а и 3-б. Ситуация четвёртая. И встречный автомобиль [ j ] находится на недостаточном расстоянии от обгоняющего автомобиля [ i ], и интервал между автомобилями [ i+1 ] и [ i+2 ] небольшой, однако автомобиль [ i ] пытается начать обгона автомобиля [ i+1]. В зависимости от квалификации участников дорожно-транспортной ситуации и их дальнейшего поведения в её развитии, исход может завершится либо благополучно, либо совершением ДТП. Алгоритм реализован в программе SitObgn_T для равномерного транспортного потока интенсивностью М1в прямом направлении и М2 – в обратном направлении, а так же в программе BTZ1_T для бимодального режима движения в двух направлениях - ситуация 4-а и 4-б. Ситуация пятая аналогична предыдущей ситуации, однако отличается от неё тем, что обгоняющий автомобиль [ i ] практически "сидит на хвосте" автомобиля [ i+1], то есть не только пытается начать обгон, когда у него ещё имеется возможность вернуться на свою полосу, но уже приступил к обгону. Здесь исход развития дорожно-транспортной ситуации полностью зависит от квалификации и интеллекта участников дорожно-транспортной ситуации и их дальнейшего поведения: либо автомобиль [ i+1] уступит своё место в потоке, свернув на обочину, либо встречный автомобиль [ j ] свернёт на обочину, либо ситуация завершится ДТП. Алгоритм реализован в программе SitObgn_T для равномерного транспортного потока интенсивностью М1в прямом направлении и М2 – в обратном направлении, а так же в программе BTZ1_T для бимодального режима движения в двух направлениях - ситуация 5-а и 5-б. Ситуация шестая аналогична предыдущей ситуации, однако отличается от неё тем, что временной интервал между автомобилями [ i+1 ] и [ i+2 ] вполне достаточен для начала и завершения обгона автомобиля [ i+1]. Здесь исход развития дорожно-транспортной ситуации полностью зависит от квалификации и интеллекта участников дорожно-транспортной ситуации и их дальнейшего поведения: либо автомобиль [ i+1] уступит своё место в потоке, свернув на обочину, либо встречный автомобиль [ j ] свернёт на обочину, либо ситуация завершится ДТП. Алгоритм реализован в программе SitObgn_T для равномерного транспортного потока интенсивностью М1в прямом направлении и М2 – в обратном направлении, а так же в программе BTZ1_T для бимодального режима движения в двух направлениях - ситуация 6-а и 6-б. |
В. Маркуцканд. техн. наук (Ph.D.)
DOCTOR OF SCIENCE , HONORIS CAUSA of Academy of Natural History профессор РАЕ
Заслуженный работник науки и образованияFULL MЕMBER EUROPEAN ACADEMY OF NATURAL HISTORY Заказать и получить полный текст книги В. Маркуц© Расчёт нежёстких дорожных одежд со слоями из слабосвязных материаловВ. Маркуц 2010 г.Все права защищены Законом Об Авторском праве и смежных правах в ред. Федеральных законов от 19.07.1995 N 110-ФЗ, от 20.07.2004 N 72-ФЗ Статья 48. Нарушение авторских и смежных прав: Незаконное использование произведений, изготовление одного или более экземпляров произведения или его части в любой материальной форме, либо иное нарушение предусмотренных настоящим Законом авторского права или смежных прав влечет за собой гражданско-правовую, административную, уголовную ответственность в соответствии с законодательством Российской Федерации. (ст.146 УК РФ) Маркуц Вениамин Михайловичканд. техн. наук, диплом ТН № 098695 от 13.05.1987 г. тел. 8 (3452) 43-98-86, Е-mail: markusb@mail.ru
Вы можете получить книгу "Расчёт нежёстких дорожных одежд со слоями из слабосвязных материалов" в электронной формеЗДЕСЬ_Raschet_nezh.d.o.docx Купить книгу "Расчёт нежёстких дорожных одежд со слоями из слабосвязных материалов" на бумажном носителе Вы можете, нажав на ссылку ниже:
«Расчёт нежёстких дорожных одежд со слоями из слабосвязных материалов» |
<!-- Yandex.Metrika --> <!-- Yandex.Metrika --> <!--Rating@Mail.ru counter--> |